NASA’s Mars Reconnaissance Orbiter, or MRO, has captured a striking orbital view of China’s Zhurong rover and the route it carved across the Martian landscape after landing in 2021. The image is notable for more than its novelty. It shows how modern planetary imaging systems can follow a working rover from hundreds of kilometers above the surface, reveal its wheel tracks and place its movements in a much larger geological setting.
The scene comes from the HiRISE camera, a high-resolution instrument aboard MRO that has spent years documenting Mars in exceptional detail. In this case, the camera recorded Zhurong’s path in southern Utopia Planitia, the broad plain where China’s Tianwen-1 mission delivered the rover and its lander on May 14, 2021. By the time of the image described here, acquired on March 11, 2022, the rover had already traveled for about 10 months on the surface.
China’s space program had already released several memorable images from the mission, including a rover-and-lander “family portrait” taken by a remote wireless camera on the ground. But orbital images tell a different story. Instead of showing the vehicle itself at close range, they reveal where the rover has gone, how far it has moved and how its exploration route relates to the surrounding terrain. That broader perspective is valuable for mission analysis, geology and future planning.
For readers interested in technology and advanced instrumentation, this is a useful example of how a mature orbital platform can support surface missions even when those missions belong to another space program. It is also a reminder that engineering on Mars is increasingly about systems working together: landers, rovers, relay orbiters, cameras, navigation tools and data analysis pipelines all contribute to the final scientific picture.
A rover seen from orbit
Zhurong arrived on Mars as part of China’s Tianwen-1 mission, which first spent roughly three months orbiting the planet before sending the lander and rover down to the surface. The landing site in Utopia Planitia was chosen because it offered broad, relatively smooth terrain and strong scientific interest. The region has long attracted attention because of its geology and because it may preserve clues to past environmental conditions.
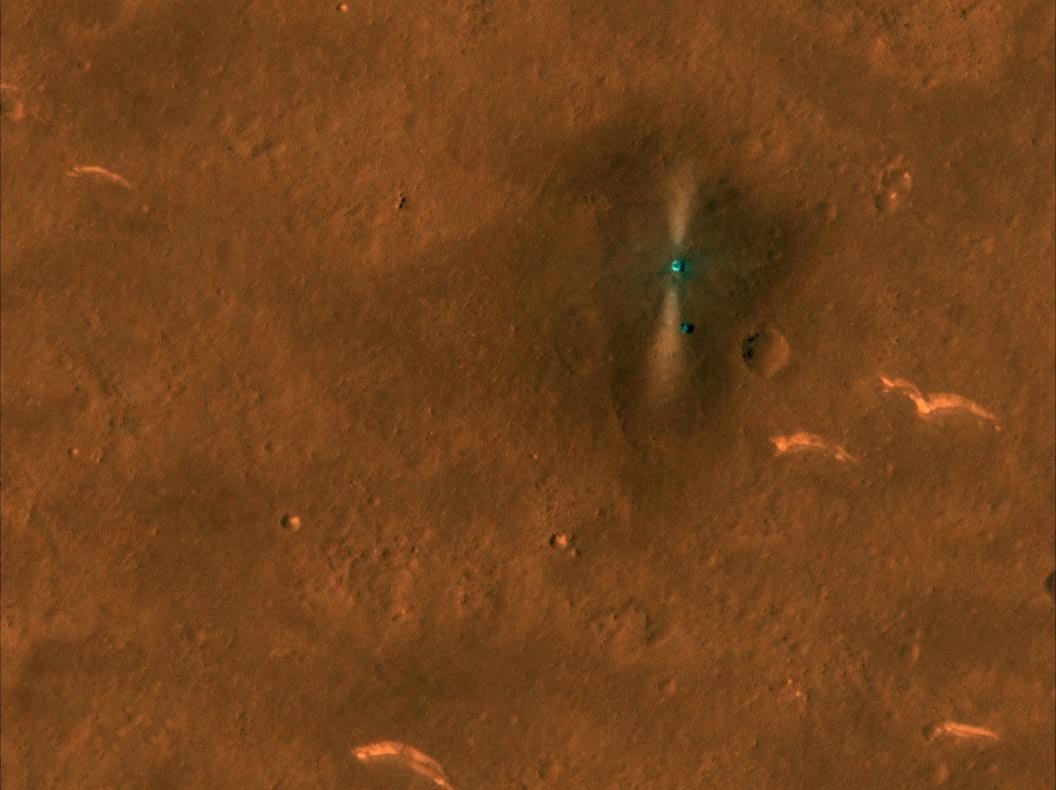
Early in the mission, HiRISE had already managed to spot the lander and rover from orbit. Those initial observations confirmed the positions of the spacecraft hardware on the ground and demonstrated once again how powerful the MRO imaging system remains many years after launch. The later image is more revealing because it captures the rover after significant travel, turning a simple “find the rover” exercise into a record of movement across the Martian surface.
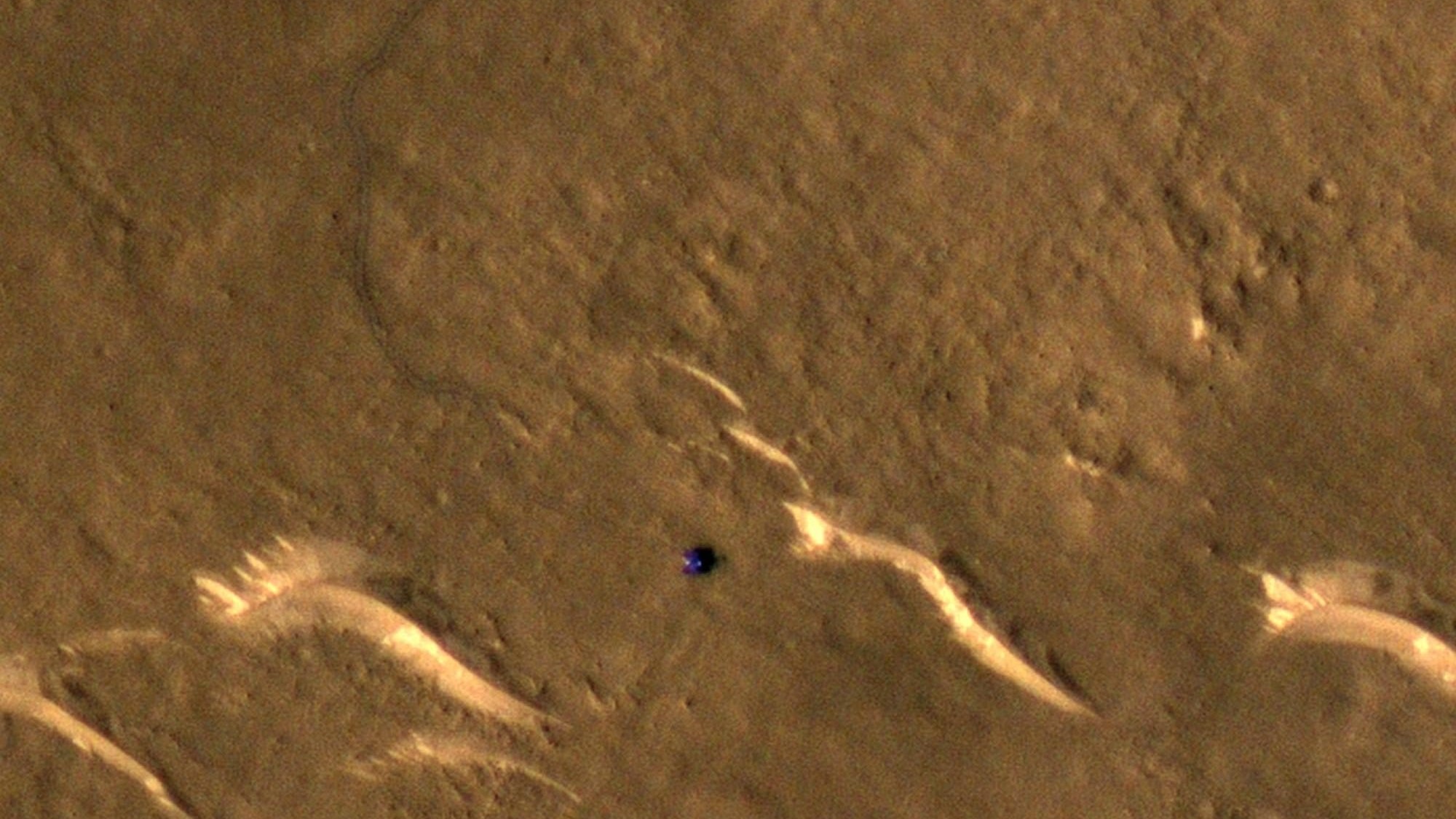
The latest view shows the rover’s newer position as well as a clear track left behind by its wheels. Even from orbit, the route is visible as a narrow disturbance running across the dusty plain. This is one of the most compelling aspects of Mars exploration imagery: the surface may appear still and timeless, but the marks left by a rover provide direct evidence of recent human-made activity on another world.

The image above, from HiRISE, shows Zhurong’s path and imaged location in southern Utopia Planitia. NASA and University of Arizona imaging teams enhanced contrast to make the tracks easier to see. Credit: NASA/JPL/UArizona.
According to the HiRISE team’s mission notes, the rover had traveled south for roughly 1.5 kilometers, or about 1 mile. The exact route can be traced from the wheel marks impressed into the surface. For a planetary mission, that kind of visibility is important. It allows scientists and engineers to check surface mobility, compare actual traverse paths with planned ones and study how the ground responds mechanically to rover traffic.
A high-resolution version of the scene also lets viewers inspect the route in more detail. In the zoomable image released by the HiRISE team, the track stands out with surprising clarity once the eye adjusts to the scale. The feature is small, but unmistakable. The lander and associated hardware can also be found nearby, linking the rover’s current position back to its original arrival point on Mars.
What the new image reveals
At first glance, this may look like a simple tracking update. In reality, the image contains several layers of information. The most obvious is the rover’s current location. Beyond that, it preserves a record of its route choice, the degree to which the track curves or changes direction and the visual texture of the terrain the rover crossed. Even with no close-up surface camera in the frame, the orbital image says something about navigation, hazard avoidance and local surface properties.
The visibility of the track also suggests that the surface carried and retained the marks well enough to remain detectable from orbit. That is scientifically useful because wheel tracks can act as informal probes of soil behavior. They may indicate how easily the top layer is disturbed, how coherent the regolith is and whether the surface is dominated by dust, crust, or more compacted material. While such conclusions require caution and supporting data, the tracks are far more than a visual curiosity.
The image additionally highlights the value of repeat observations. A single frame can show a rover. Multiple frames over time show a mission unfolding. By comparing later and earlier images, researchers can reconstruct motion, monitor changes in orientation and location and create a timeline of exploration activities. This kind of orbital follow-up has become a quiet but important part of Mars operations.
- Landing date: May 14, 2021
- Landing region: Southern Utopia Planitia, Mars
- Orbital image date: March 11, 2022
- Distance traveled: About 1.5 kilometers
- Imaging system: HiRISE aboard NASA’s Mars Reconnaissance Orbiter
The Tianwen-1 mission also included other visible hardware on the surface, such as the lander and backshell elements involved in entry, descent and landing. Those objects matter because they help analysts confirm the geometry of the landing event and understand the spatial layout of the hardware after touchdown. In some cases, orbital images of descent systems become historical records of how a mission arrived and what it left behind.
How HiRISE can see so much from so far away
MRO circles Mars at an altitude of about 316 kilometers, or roughly 250 miles, above the surface. From that height, HiRISE can achieve a resolution of around 0.3 meters per pixel, close to 1 foot per pixel. That level of detail allows it to resolve objects that are smaller than a meter across, making spacecraft hardware on the ground detectable under favorable conditions.
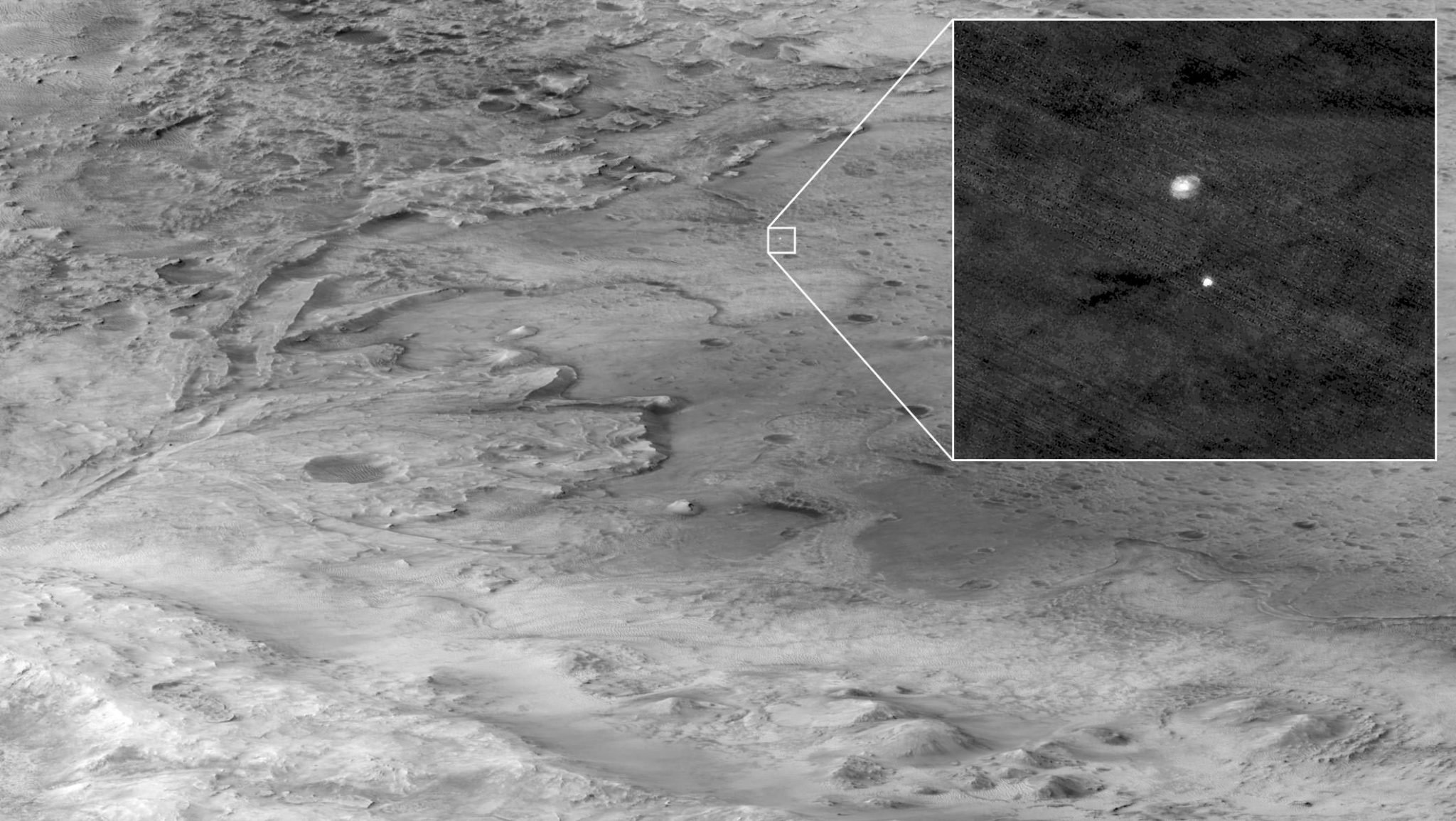
This is why HiRISE has been able to image not just Zhurong, but also multiple other Mars missions over the years. It has observed hardware associated with Opportunity, Curiosity and Perseverance. In especially dramatic cases, it even captured Curiosity and Perseverance descending through the Martian atmosphere under parachutes. Those images remain among the most iconic examples of orbital timing and camera targeting in planetary exploration.
HiRISE does not work like an ordinary consumer camera. It acquires data in long, thin strips rather than broad single snapshots. The detector layout includes 10 detectors arranged in an array, giving each image strip a width of about 5 kilometers. Two extra pairs of detectors in the central part of the system provide color information, producing a color swath about 1 kilometer wide. That design is one reason why the images are so useful for detailed surface analysis but also why finding tiny human-made objects in them can require patience and expertise.
Richard Leis of the HiRISE team noted on social media that spotting spacecraft hardware in these large image strips is not trivial. A HiRISE scene covers a broad area of terrain and the artifacts of exploration are usually tiny by comparison. Analysts must know what they are looking for, understand the local geography and often compare multiple observations before identifying an object with confidence.
That challenge makes the Zhurong imagery even more impressive. It is one thing to identify a stationary lander. It is another to trace the course of a rover over time, particularly when the path is narrow, the color contrast is low and the scene includes natural surface textures that can visually compete with the rover’s tracks.
Why orbital tracking matters
Orbital views of surface missions are scientifically and operationally useful for several reasons. First, they provide context. A rover’s own cameras may show rocks, soil and nearby slopes in rich detail, but an orbiter reveals how those local observations fit into the broader landscape. This helps teams connect small-scale measurements to regional geology.
Second, orbital images support mobility analysis. Engineers can compare the vehicle’s route with maps of surface features, estimate how terrain influenced travel and identify whether the rover approached scarps, dunes, crater ejecta, or smoother plains. That can improve interpretation of on-the-ground observations and, in ongoing missions, inform future traverses.
Third, orbiters create a valuable independent record of mission progress. Even when a rover has its own navigation data, an outside vantage point can confirm positions and reveal changes that may not be obvious from the surface. This matters for long-duration exploration and for reconstructing the history of a mission after the fact.
For a technology audience, there is another lesson here: extreme-environment systems benefit from layered observation. Whether in space, heavy industry, or remote infrastructure, one platform often works best when another platform can inspect it from a distance. In that sense, the Zhurong images are a planetary-scale example of remote monitoring, precision imaging and cross-platform verification.
An international and technical milestone
The imagery also carries a broader significance beyond one rover track. It shows how Mars exploration has become a more international undertaking. China’s Tianwen-1 mission marked a major milestone, placing both an orbiter and a successful rover at Mars. NASA’s MRO, meanwhile, served as a witness in orbit, documenting the mission from above. The result is a layered record built from assets belonging to different national programs but focused on the same planetary environment.
That shared observational landscape benefits science. Public release of orbital and surface imagery gives researchers, educators and the wider public more ways to understand what is happening on Mars. Surface images offer intimacy and immediacy. Orbital images offer scale and context. Together, they create a far more complete view of exploration than either one could provide alone.
There is also a subtle engineering story in the image. A rover that can travel more than a kilometer across another planet is not only a triumph of software and control systems. It is a test of wheels, chassis components, electronics, thermal systems, dust tolerance and the reliability of every material in the vehicle. The fact that those movements can be read later from orbit adds a kind of audit trail to the mission’s mechanical performance.
For industries that care about advanced materials and harsh-environment technology, this is familiar territory. Mars rovers are built to survive abrasion, thermal cycling, radiation exposure and persistent dust. Orbital imaging does not measure every one of those effects directly, but it can show whether the vehicle is still moving, how it interacts with the surface and whether the broader mission architecture is functioning as intended.
More than a photograph
The latest HiRISE view of Zhurong is easy to appreciate as a beautiful and unusual image. Yet its deeper value lies in what it demonstrates about planetary observation. A camera orbiting hundreds of kilometers above Mars can identify a rover, trace where it has driven and add that information to a long-running record of robotic exploration on the planet.
It also reinforces the extraordinary longevity and scientific return of the Mars Reconnaissance Orbiter. Long after its arrival at Mars, MRO continues to support new missions and produce data that remain relevant to scientists, engineers and mission planners. Instruments like HiRISE become more valuable over time because they accumulate not just images, but historical continuity. They let us revisit landing sites, compare changes and watch activity unfold over months and years.
In the case of Zhurong, that continuity turned a distant rover into a visible traveler with a mapped route and a documented presence in Utopia Planitia. The image shows that exploration on Mars is no longer represented only by isolated snapshots. It can be followed, measured and interpreted as an ongoing process.
Readers who want to explore the release in more detail can visit the HiRISE post describing the image, inspect the high-resolution crop of the rover track, or compare this orbital perspective with surface images discussed by Universe Today. Together, those resources show how a small rover on a distant plain can still leave a visible mark – one that an orbiter can read from space with remarkable precision.
Related reading
More journal reading and science coverage connected to this topic.
Polymerization Technology
A modern overview of how reaction engineering shapes polymer architecture, productivity, and scale-up.

Research on pretreatment technology for corn husk degumming
Title: Research on pretreatment technology for corn husk degumming Page Range: p.687-692 Author(s): Rong Zhou; Mingxia Yang; Haixia Zhang File size: Download the pdf…
STUDY OF DIFFUSION PERFORMANCE AND PREPARATION TECHNOLOGY OF THE COLOURED PMIA FIBRE
Title: STUDY OF DIFFUSION PERFORMANCE AND PREPARATION TECHNOLOGY OF THE COLOURED PMIA FIBRE Page Range: p.601-608 Author(s): Li-Qi Liu; Lei Chen; Zu-Ming Hu; Jun-Rong…